共轭方向
无约束最优化方法的核心问题就是选择搜索方向
定义:设 为对称正定矩阵,若
为对称正定矩阵,若 中的两个方向
中的两个方向 和
和 满足
满足 ,则称这两个方向关于
,则称这两个方向关于 共轭,或称它们关于正交。
共轭,或称它们关于正交。
若,,..., 为中k个方向关于共轭,满足
为中k个方向关于共轭,满足 ,也即
,也即 与
与 正交,称这组方向是A共轭的。
正交,称这组方向是A共轭的。
若A为单位阵,则这两个方向关于A共轭等价于两个方向正交。
二次函数  ,
, 为一个定点,
为一个定点,
 的等值面
的等值面 是以为中心的椭球面。
是以为中心的椭球面。
由于 ,A正定,所以为的极小点。
,A正定,所以为的极小点。
设 为等值面上一点,该等值面在点处的法向量
为等值面上一点,该等值面在点处的法向量 (注:二元函数一条等值线上一点的法向量即梯度)
(注:二元函数一条等值线上一点的法向量即梯度)
设为等值面在处的一个切向量,显然与 正交。同时,令
正交。同时,令 ,所以
,所以
结论:等值面上一点处的切向量与由这一点指向极小点的向量关于A共轭。
所以,极小化这个二次函数,若一次沿着 和进行一维搜索,必将到达最小点。
所谓最速真的是最速吗?
回顾最速下降法,用最速下降法极小化目标函数时,相邻两个搜索方向是正交的。
因为梯度是函数局部性质,从局部看,最速下降方向确实是函数值下降最快的方向,然而从整体看,由于锯齿现象的影响,则走过了许多弯路,使收敛速度大为减慢。最速下降法并不是收敛最快的方向。
对于二次型,从初始点 出发,最速下降法可由如下描述
出发,最速下降法可由如下描述

下图中极小点位于 ,令
,令 为每次迭代的误差向量,显然这个向量是无法计算的因为我们并不知道
为每次迭代的误差向量,显然这个向量是无法计算的因为我们并不知道 。
。
但是我们可以计算

记残差向量 ,可以发现
,可以发现 。
。
最速下降法即通过贪婪地减少误差项,在下一个点 时
时 (can only make square turns)。这个性质对于对称正定矩阵Hessian矩阵A的(二维)二次型来说,就意味着搜索方向一定会大于2次。为了确保迭代次数少于两次,就需要选择一个起始点,
(can only make square turns)。这个性质对于对称正定矩阵Hessian矩阵A的(二维)二次型来说,就意味着搜索方向一定会大于2次。为了确保迭代次数少于两次,就需要选择一个起始点, 或者
或者 。当然我们无法计算误差向量。
。当然我们无法计算误差向量。
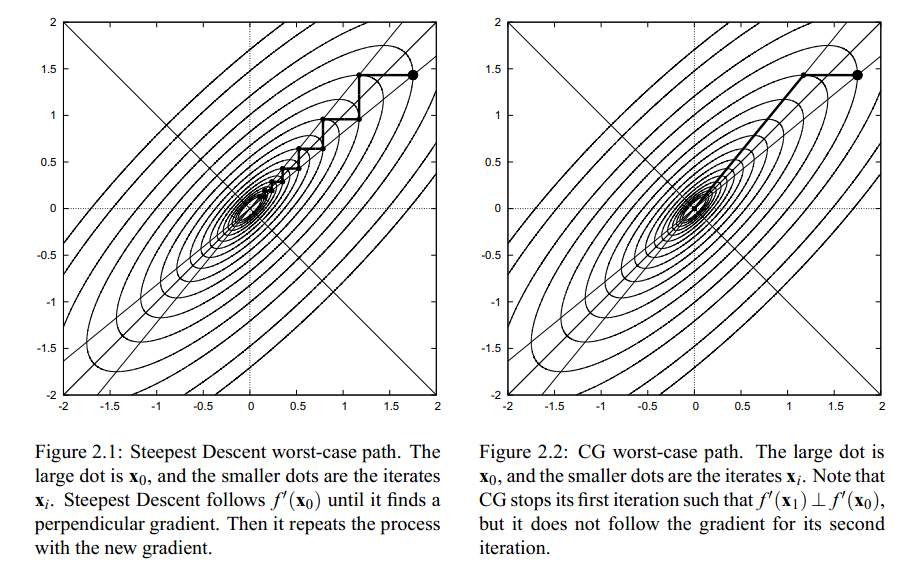
共轭梯度法的基本思想:利用已知点处的梯度构造一组共轭方向,并沿这组方向进行搜索,求出目标函数值得极小点。根据共轭方向的基本性质,这种方法具有二次终止性。
对于二次型的Hessian矩阵为常值,所以可以构造一组搜索方向来避免redundant caculations。
假设有一组n个独立线性无关的方向向量 以及对应的尺度
以及对应的尺度

我们要做的就是将误差 迭代减小为0.假定我们知道并求解上式,则时间复杂度为
迭代减小为0.假定我们知道并求解上式,则时间复杂度为 。但是,如果方向向量是相互正交的,则可以在
。但是,如果方向向量是相互正交的,则可以在 求解得
求解得 。但是问题是我们是不知道的。
。但是问题是我们是不知道的。
又是先前的那个trick,我们计算

求解这个问题仍然是,相比是相互正交的,我们让 。求解
。求解 可通过左乘
可通过左乘 ,
,

那么我们可以求得

其中
共轭梯度法每一步迭代仅依赖于矩阵A和先前的迭代项,除了,实际上,也可以写成先前的迭代项形式,因此我们只需要存储一些向量和矩阵A。
当A_{n\times n},CG方法可以在不超过n次迭代内得到精确解。但是当在计算机上执行舍入运算时,这个性质无法保证。因为计算误差会减少方向向量之间的共轭性,从而使得算法可能会超过n次迭代。
CG的收敛率取决于

其中 为条件数,Hesse矩阵的最小特征值
为条件数,Hesse矩阵的最小特征值 ,最大特征值为。CG终止条件为
,最大特征值为。CG终止条件为 。这种最坏情况下CG的时间复杂度为
。这种最坏情况下CG的时间复杂度为 ,
, 为A中的非零迹项。显然,最坏情况发生在A的特征值为均匀分布,而较好的收敛率则出现在有多重特征值时。
为A中的非零迹项。显然,最坏情况发生在A的特征值为均匀分布,而较好的收敛率则出现在有多重特征值时。
所以,选择迭代终止条件也是一个很有讲究的问题。
用于二次函数的共轭梯度法
对于二次型

 为对称正定矩阵,
为对称正定矩阵, 和
和 为长度为
为长度为 的向量,
的向量, 为尺度。
为尺度。
假定 SPD,即
那么必有global minimum,最小点在point、line or plane上取得,不会有local minimum。
令 ,则
,则
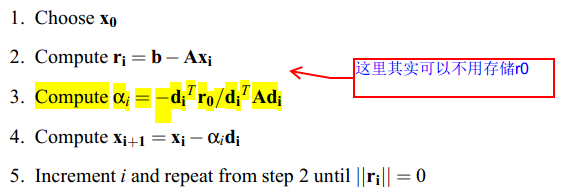
算法步骤:
1)选取初始点,计算出目标函数在该点的梯度,若 ,则停止计算;否则,令第一个搜索方向
,则停止计算;否则,令第一个搜索方向 ,并记为此时方程的残差
,并记为此时方程的残差
2)沿方向 搜索,得到点
搜索,得到点 ,计算在点处的梯度,若
,计算在点处的梯度,若 ,则利用
,则利用 和构造第2个搜索方向
和构造第2个搜索方向 。先暂时假定我们已知该搜索方向。
。先暂时假定我们已知该搜索方向。
一般地,若已知点 和搜索方向
和搜索方向 ,则从出发,沿进行搜索,得到
,则从出发,沿进行搜索,得到

其中步长 满足
满足 。
。
令 ,求令
,求令 的极小点。
的极小点。
令 即
即
根据二次函数的梯度表达式,可得



所以根据上式可得

3)计算在点 处的梯度,若
处的梯度,若 ,则停止计算;否则,利用
,则停止计算;否则,利用 和构造下一个搜索方向
和构造下一个搜索方向 ,并使和关于共轭
,并使和关于共轭

上式两端左乘 ,并令
,并令

所以可得

综上分析,在第1个搜索方向取负梯度的前提下,伴随计算点的增加,构造出一组搜索方向,可以证明这组方向是关于A共轭的,因此,共轭梯度法具有二次终止性。(证明请参见《最优化方法》 陈宝林)
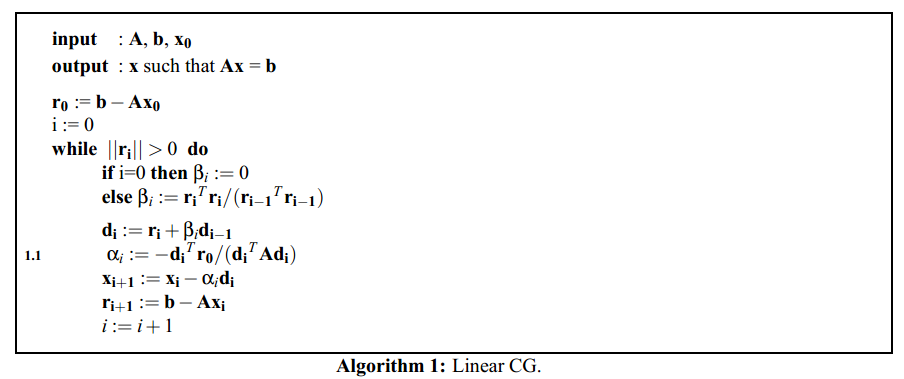
共轭梯度法:旨在求解线性方程Ax=b,A为正定矩阵。仅需一阶导数信息,但克服了最速下降法收敛慢的特点,又避免了牛顿法需要存储和计算Hessian矩阵并求逆的缺点。所以适合求解大型系统。当A is well-conditioned时,其远远快于其他方法如高斯消除法(时间复杂度 ,显然不适用于求解大型线性方程)。通过迭代方法去寻找的近似解。
,显然不适用于求解大型线性方程)。通过迭代方法去寻找的近似解。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
function x = conjgrad(A,b,tol) % CONJGRAD Conjugate Gradient Method. % X = CONJGRAD(A,B) attemps to solve the system of linear equations A*X=B % for X. The N-by-N coefficient matrix A must be symmetric and the right % hand side column vector B must have length N. % X = CONJGRAD(A,B,TOL) specifies the tolerance of the method. The % default is 1e-10. % By Yi Cao at Cranfield University, 18 December 2008 if nargin<3 tol=1e-10; end x = b; %initial point r = b - A*x; %residual if norm(r) < tol return end y = -r; %search direction z = A*y; s = y'*z; t = (r'*y)/s; %intial stepwidth x = x + t*y; %next point for k = 1:numel(b); r = r - t*z; if( norm(r) < tol ) return; end B = (r'*z)/s; %new search direction,composed of negative gradient direction and last search direction y = -r + B*y; z = A*y; s = y'*z; t = (r'*y)/s; x = x + t*y; end end |
Well-conditioned情况下:
|
1 2 3 4 5 6 7 8 9 |
n=1000; [U,S,V]=svd(randn(n)); s=diag(S); A=U*diag(s+max(s))*U'; % to make A symmetric, well-contioned b=randn(1000,1); tic,x=conjgrad(A,b);toc tic,x1=A\b;toc norm(x-x1) norm(x-A*b) |
|
1 2 3 4 5 6 7 8 9 |
实验结果:Elapsed time is 0.014805 seconds. Elapsed time is 0.029196 seconds. ans = 5.4321e-13 ans = 2.8499e+03 condition = 37.4486 |
Not Well-conditioned情况下:
|
1 2 3 4 5 6 7 8 9 10 |
clc,clear all n = 6000; m = 8000; A = randn(n,m); A = A * A'; b = randn(n,1); tic, x = conjgrad(A,b); toc norm(A*x-b) tic,x2=A\b;toc norm(A*x2-b) |
|
1 2 3 4 5 6 7 8 9 |
实验结果:Elapsed time is 7.117208 seconds. Elapsed time is 1.613006 seconds. ans = 3.0676e-09 ans = 1.4840e-12 condition = 2.7901e+04 |
参考资料:
1、陈宝林 《最优化理论与算法》 第二版
2、PaulKomarek “LogisticRegressionforDataMiningand High-DimensionalClassification”
3、http://blog.163.com/yuyang_tech/blog/static/216050083201210294100593/
补充知识:
矩阵条件数的定义:

矩阵条件数的性质:
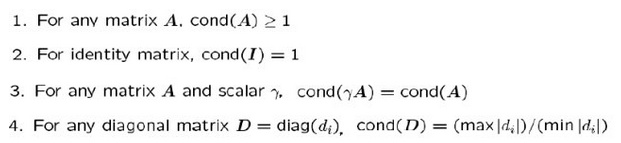
Matlab中计算矩阵条件数的函数:
|
1 2 3 4 5 |
cond(A)或cond(A, 2)用于计算2-条件数,它调用函数svd(A),适合于较小的矩阵。 cond(A, 1)计算1-条件数,它调用函数inv(A),运算量小于cond(A, 2)。 cond(A, inf)计算∞-条件数,它调用函数inv(A),等同于计算cond(A’, 1)。 condest(A)估算1-条件数,它使用lu(A)以及Higham和Tisseur 2000年提出的一个算法,特别适合于大型稀疏矩阵。 rcond(A)估算1-条件数的倒数,它使用lu(A)以及由LINPACK和LAPACK项目组开发的一个较老的算法。 |